State-based Motor Cortical Population Dynamics
Objective
Uncover the structure of motor commands produced by populations of neurons in primary motor cortex.
Approach
I used Hidden Markov Models to categorize neural activity into “population states”, and incorporated latent-variable models to account for dynamic changes in firing rate and neural trajectory within each population state.

The flow of neural activity in different areas of a 2D state-space, segmented by “population state”

a cloud of dimensionally-reduced neural data, colored by population state.
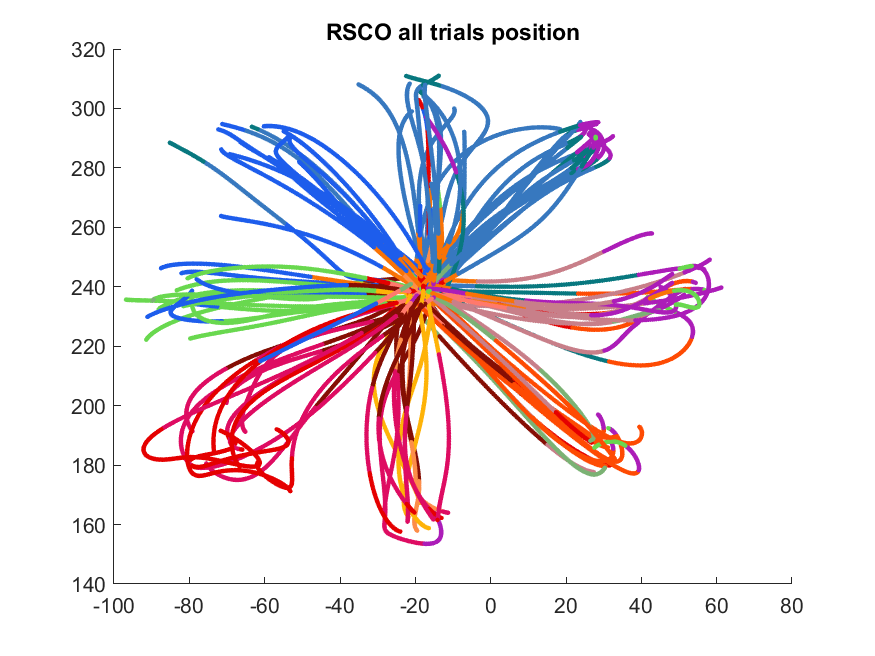
Traces of hand movements, colored by neural population state.
Main Results
We found that neural populations code for acceleration and deceleration separately, and for different directions, instead of coding for an entire movement all at once. We also found that the neural dynamics of these different accelerative and decelerative states were substantially dissimilar.
Significance
More clearly understanding how neural activity is structured, and its relationship to movement, helps us understand how the brain learns, plans and executes movements. We can leverage these findings to improve the experience of using brain-machine interfaces, which help restore function to people who have disabilities.